Imagine machines scaling frozen alien volcanoes on Mars, plumbing the crushing black depths of Earth's oceans, or silently mapping uncharted caverns humans dare not enter. This isn't science fiction – it's the daily reality powered by Exploration Robots. But what exactly defines these remarkable machines beyond simply "going where humans can't"? This definitive guide dives into the core anatomy, intelligence, and revolutionary mission profiles that truly set Exploration Robots apart as the indispensable pioneers of our age, revealing a definition far richer than you've likely encountered. Understand the powerful synergy of AI, specialized hardware, and autonomous grit that makes their unprecedented discoveries possible.
The Essence of an Exploration Robot: More Than Just a Remote-Controlled Vehicle
At its core, an Exploration Robot is a mobile, intelligent machine specifically engineered to autonomously or semi-autonomously navigate, investigate, and gather critical data from environments that are too dangerous, inaccessible, or logistically impractical for humans to explore directly. While remotely operated vehicles (ROVs) for simple observation exist, true Exploration Robots embody a far more sophisticated concept. Their defining purpose is active discovery – venturing into the utterly unknown, not just monitoring the familiar.
This mission necessitates capabilities far exceeding basic mobility. An Exploration Robot is equipped with advanced sensor suites (cameras, spectrometers, LiDAR, sonar), onboard scientific instruments, robust computing power for in-situ analysis, sophisticated navigation systems capable of handling extreme environmental ambiguity, and varying degrees of Artificial Intelligence (AI) for decision-making without constant human oversight. They aren't merely tools; they are extensions of human curiosity and scientific capability, purpose-built to reveal secrets hidden by distance, pressure, temperature, radiation, or sheer scale.
The Core Pillars of the Exploration Robot Definition
1. The Environment: Confronting the "Untouchable"
The defining characteristic of Exploration Robots is the nature of their operational domains. These are inherently environments possessing one or more conditions that preclude safe, effective, or economically feasible human presence. Think:
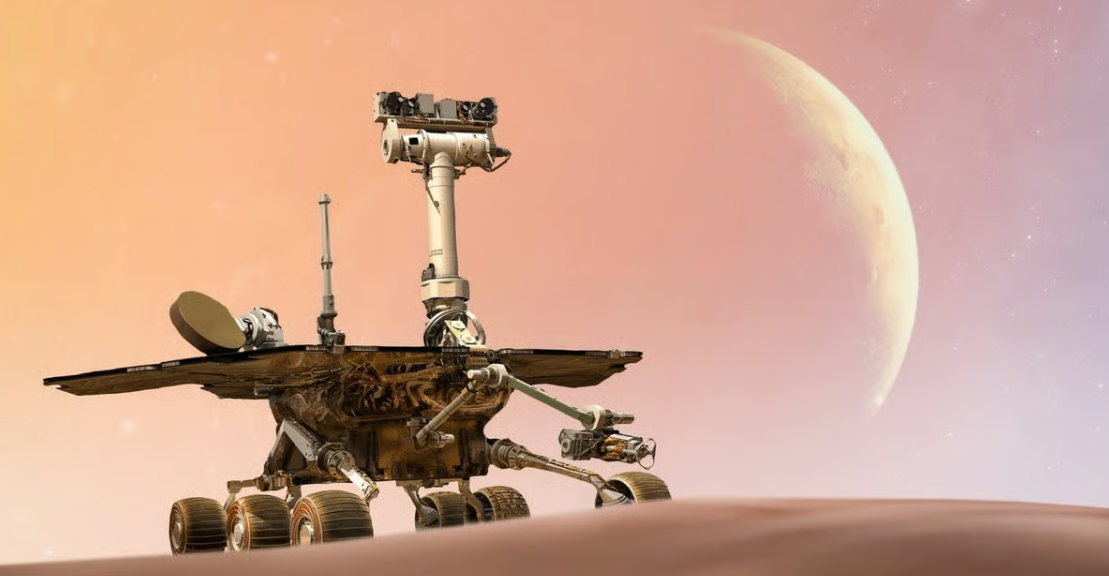
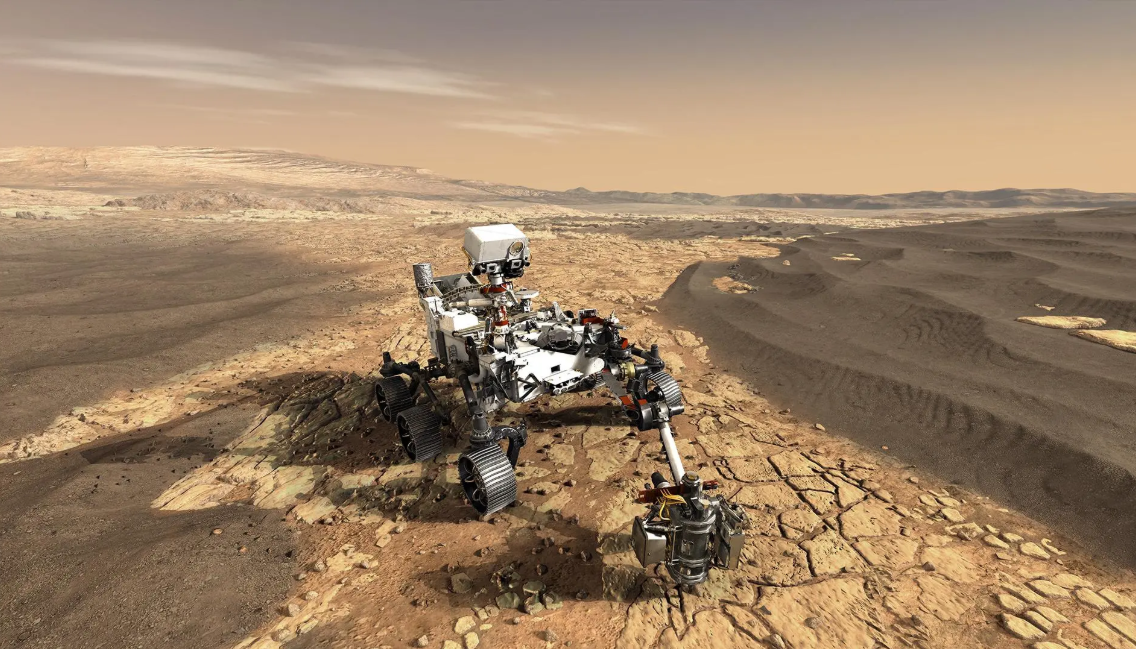
Planetary Bodies: Mars rovers like Perseverance endure extreme cold, dust storms, radiation, and vacuum. Lunar missions face abrasive regolith and harsh thermal swings.
Deep Ocean: Submersibles like Alvin or unmanned AUVs endure pressures exceeding 1,000 atmospheres, perpetual darkness, and corrosive seawater at depths exceeding 6,000 meters.
Volcanic & Geothermal Zones: Mapping active lava tubes (as seen on Earth, but vital for Moon/Mars exploration) requires machines to handle extreme heat and toxic gases.
Collapsed Structures & Caves: Navigating unstable debris, confined spaces, and zero visibility demands compact, rugged bots equipped for mapping where GPS fails. Uncharted Depths: How Cave Exploration Robots Are Rewriting Discovery & Saving Lives delves into this critical application.
Nuclear Disaster Zones: Robots enter highly radioactive areas (e.g., Fukushima Daiichi) for mapping and mitigation, protecting human responders.
The robot's design – materials, shielding, thermal control – is meticulously tailored to survive these specific hostility profiles. An Exploration Robot deployed on Venus, for instance, must withstand surface temperatures hot enough to melt lead and pressures akin to ocean depths.
2. The Mission Imperative: Discovery, Science, & Intelligence Gathering
While inspection drones or pipeline crawlers perform specific tasks in known environments, Exploration Robots are fundamentally driven by the quest for the *unknown*. Their core mission objectives encompass:
Mapping & Surveying: Creating detailed topological, geological, or chemical maps of completely unknown or poorly understood regions (e.g., Mars surface, deep ocean trenches, cave networks).
Sample Acquisition: Collecting scientifically valuable physical samples (rock, ice, soil, biological specimens) *autonomously* or via teleoperation, often involving complex manipulation.
Scientific Instrument Deployment: Carrying sophisticated labs (e.g., spectrometers, chemical analyzers) to conduct experiments in-situ rather than returning samples, vastly increasing efficiency.
Search & Identification: Finding evidence of past or present life (biosignatures), mineral resources, or hidden hazards using AI-powered image analysis and sensor fusion.
They answer fundamental scientific questions: "What is this place?" "How did it form?" "Is there life here?" "What resources are present?"
3. Capabilities: The Body & Senses Built for the Unknown
Surviving the environment and executing the mission demands specialized hardware:
Enhanced Mobility: Rocker-bogie systems (Mars rovers), tracked designs for rubble, walking legs for uneven terrain, rotors for planetary flyers (Ingenuity Mars Helicopter), thrusters for underwater/subsurface navigation. Redundancy is crucial.
Robust Sensing: Multi-spectral cameras, 3D LiDAR, ground-penetrating radar, high-resolution sonar arrays, radiation detectors, gas chromatographs, environmental sensors (temp, pressure, humidity). They gather vastly more data than simple optical cameras.
Dexterous Manipulation: Robotic arms with end-effectors (drills, scoops, grippers) capable of precise sample handling even with communication delays. Some incorporate force feedback for remote operators.
Endurance & Self-Reliance: Designed for extended durations without maintenance. Power systems often include RTGs (Radioisotope Thermoelectric Generators) for deep space or ocean missions where solar energy is insufficient. Thermal protection systems maintain critical internal temperatures.
4. Autonomy & Intelligence: The Mind Behind the Machine
This is where Exploration Robots distinguish themselves starkly from simpler remote-controlled systems. Communication delays can be minutes (Earth-Mars) or nonexistent (deep ocean cable limitations), making real-time human control impossible. Thus, they require significant autonomy:
Path Planning & Navigation (SLAM): Simultaneous Localization and Mapping (SLAM) allows robots to build internal maps of unknown territory while keeping track of their own position within it, navigating obstacles autonomously.
Scientific Autonomy: AI algorithms enable on-the-spot decisions. For example: "This rock looks mineralogically interesting based on spectral data – prioritize its analysis." "Detected unusual methane spike – investigate immediately." This maximizes scientific yield despite limited mission time.
Fault Detection & Recovery: Ability to self-diagnose problems (sensor failure, stuck wheel, power drain) and attempt self-recovery procedures or implement "safe modes."
Data Prioritization: Limited bandwidth means robots must compress data and decide *what* most important information to send back first.
This autonomy level is orders of magnitude higher than an industrial robot arm or a surveillance drone. AI (Machine Learning, Computer Vision, Planning algorithms) is integral to their definition.
The rapid evolution of this autonomy is perhaps best exemplified in space. Discover more about this revolution in The Unstoppable Rise of Space Exploration Robots: Cosmic Pioneers Changing Everything.
5. The Inescapable Role of AI
Modern Exploration Robots are inextricably linked to Artificial Intelligence. AI enables the sophisticated autonomy required for exploration tasks:
Enhanced Perception: AI classifies terrain features (sand, rock, hazard), identifies scientifically valuable targets (specific rock types, visual anomalies), and interprets sensor data in real-time.
Long-Term Planning: Given broad mission goals ("explore this crater"), AI systems can generate detailed, resource-optimized, safe operation plans.
Adaptive Problem Solving: Encountering unexpected obstacles? AI helps the robot dynamically replan paths or find novel solutions using learned models.
Human-Robot Teaming: Sophisticated AI allows for natural language command interfaces and predictive assistance for human operators, making the robot an intelligent partner rather than just a tool.
Without significant AI integration, robots cannot effectively explore the complex, unstructured environments that define their purpose. The AI acts as the onboard scientist and navigator, extending human capabilities across vast distances.
The Evolving Landscape: Redefining Boundaries & Ethics
The definition of Exploration Robots isn't static. Several trends are pushing the boundaries:
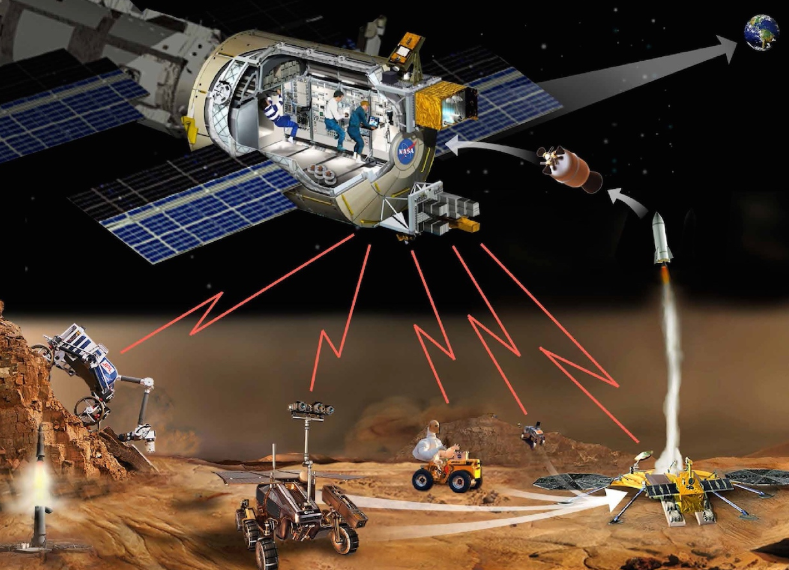
Human-Robot Collaboration: Astronauts on the Moon/Mars will likely deploy and supervise fleets of Exploration Robots, leveraging local human judgment for complex tasks while robots handle routine exploration and logistics.
Swarm Robotics: Coordinated groups of smaller, simpler robots exploring simultaneously (e.g., mapping large cave systems, covering vast planetary terrains). This increases redundancy and exploration efficiency.
Biologically Inspired Designs: Robots mimicking insect locomotion for rugged terrain, fish-like bodies for efficient underwater propulsion, or snake-like forms for confined spaces.
AI Maturation: As AI reasoning, learning, and context understanding improve, robots will make more complex, "smarter" decisions with less human input.
Ethical Considerations: Exploration inevitably raises questions: contamination risks (forward contamination taking Earth microbes to other planets, backward contamination bringing alien microbes back), impact on pristine environments (even robot tracks on Mars alter the surface over decades), and the future potential for robots making morally weighted decisions during exploration missions.
These factors constantly refine what we *mean* by an Exploration Robot.
Frequently Asked Questions (FAQs) About Exploration Robots
Q: What are the key differences between an Exploration Robot and a regular industrial robot?
A: The differences are fundamental. Industrial robots operate in highly structured, predictable factory environments (think fixed positions, repetitive tasks). They excel at speed, precision, and power for tasks like welding or assembly, often under constant human supervision. Exploration Robots, conversely, are engineered for the *opposite*: extreme unpredictability. They confront unstructured, often completely unknown terrains (deep space, ocean trenches, collapsed buildings), prioritize robust mobility and endurance, possess sophisticated sensory suites for scientific discovery, require high levels of autonomy due to communication constraints or danger, and prioritize adaptability and self-reliance over raw speed or precision. Their purpose is discovery itself, not production.
Q: Why can't we just rely on orbital satellites or telescopic observations instead of sending Exploration Robots?
A: Satellites provide invaluable global perspectives but are fundamentally limited. They offer surface data only, struggle to see into permanently shadowed regions (craters, caves), provide lower resolution than ground-level sensors, cannot directly analyze subsurface composition, and are physically incapable of sample collection. Telescopic observations face atmospheric interference (Earth-based), distance limits, and resolution constraints. Exploration Robots solve this "ground truth" problem. They deliver the high-resolution, in-situ detail: the composition of specific rocks beneath the surface dust (using ground-penetrating radar or drills), the microenvironments within cave systems, chemical signatures deep within an ocean vent inaccessible from orbit, and the physical samples needed for definitive analysis. They bridge the gap between distant observation and tangible understanding.
Q: What defines the current "cutting-edge" in Exploration Robots?
A: The frontier lies in enhanced autonomy and resilience. Cutting-edge robots feature:
Multi-Robot Collaboration: Sophisticated coordination between aerial drones, ground rovers, and submersibles exploring complex environments simultaneously.
"Explainable AI" (XAI): AI systems that don't just make decisions but can explain *why* they made them to human operators, building crucial trust.
Biohybrid Designs: Incorporating biological components (like engineered muscle tissues for grippers) for enhanced dexterity or adaptability in specific conditions.
Self-Maintenance & Self-Reconfiguration: Concepts for robots using onboard tools for minor repairs or even modifying their own structure for specific tasks encountered during exploration.
Extreme Longevity & Self-Sufficiency: Designs for decades-long missions requiring advanced closed-loop systems for resource utilization (e.g., generating power or fuel from local resources).
The Fourth Wave of Exploration
The definition of Exploration Robots ultimately centers on their role as humanity's indispensable proxies and pioneers. They are not mere cameras on wheels; they are complex, AI-integrated systems purpose-built to endure the hostile and traverse the inaccessible, embodying an unwavering drive for discovery. They represent the synthesis of cutting-edge materials science, AI, mechanical engineering, and sensor technology, specifically tuned to reveal the secrets of environments beyond the limits of our physical reach. From Martian plains forged by ancient waters to the hidden ecosystems thriving at boiling undersea vents, these robots are rewriting our understanding of the cosmos and our own planet. Defining them is defining the very tools unlocking the next chapter of human knowledge. Their story is the story of pushing boundaries, one autonomous decision and one unprecedented sensor reading at a time.